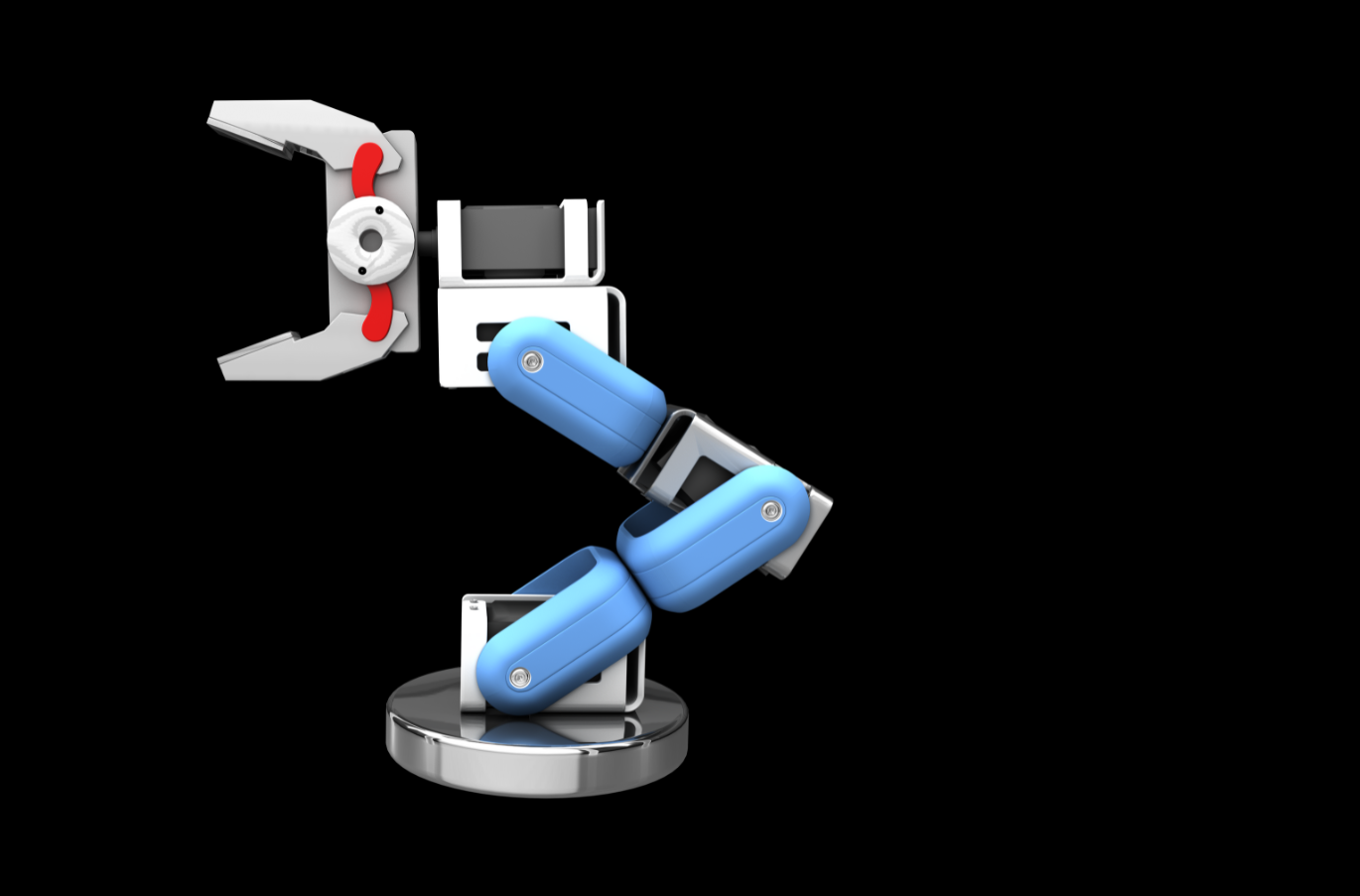
Development of a 7 degree of freedom robotic arm
It can move up to 6 axis using stepper motors with 7th degree of freedom (7DOF) including hydraulic or pneumatic gripper.
F1 represents the base joint which is 1st DOF,
F2 represents shoulder joint which is 2nd DOF,
F3 represents the elbow joint which is 3rd DOF,
F4 is arm rotation which is 4th DOF,
F5 represents wrist joint for up and down movement which is 5th DOF,
F6 represents the wrist joint rotation which is 6th DOF,
F7 represents the gripper/finger movement which is 7th DOF.